Xception Architectural Design
Xception model
Inspired by Google's Inception model
Xception is based on an 'extreme' interpretation of the Inception model
The Xception architecture is a linear stack of depthwise separable convolution layers with residual connections
Simple and modular architecture
Depthwise Separable Convolution
Regular Convolutions:
look at both channel & spatial correlations simultaneously
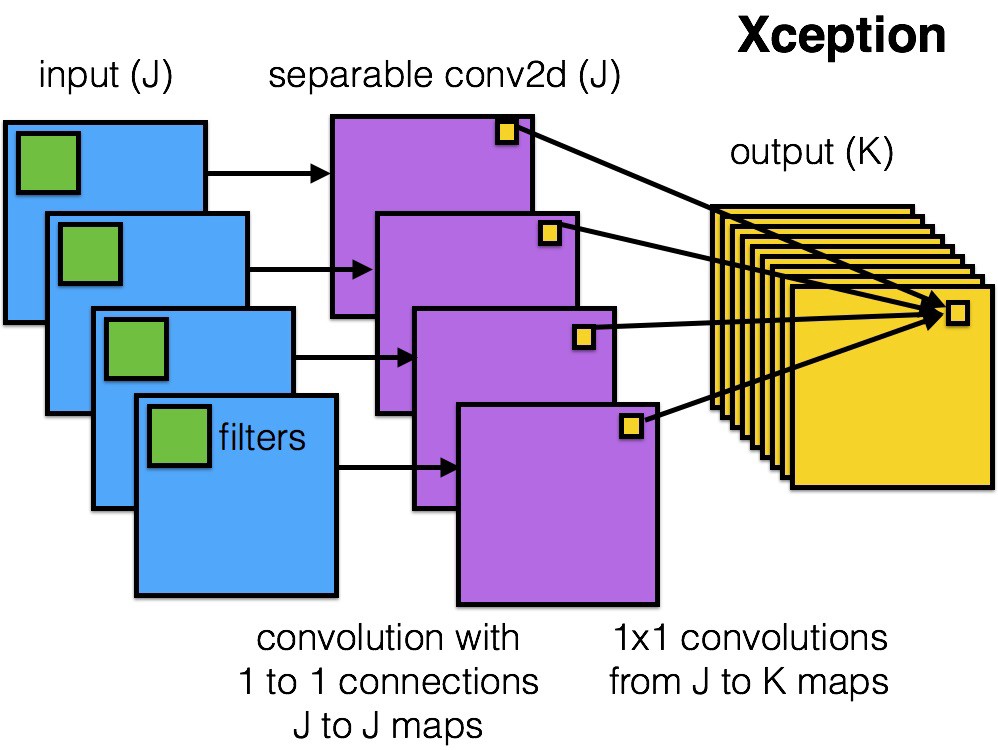
Depthwise separable convolution:
look at channel & spatial correlations independently in successive steps
spatial convolution: 3x3 convolutions for each channel
depthwise convolution: 1x1 convolutions on concatenated channels
Example: take 3x3 convolutional layer on 16 input channels and 32 output channels.
regular convolution: 16x32x3x3 = 4608 parameters
depthwise separable convolution: (spatial conv + depthwise conv) = (16x3x3 + 16x32x1x1) = 656 parameters
greatly reduced parameter count
more efficient complexity
maintains cross-channel features
Inception Model
fundamental hypothesis: cross-channel correlations and spatial correlations are sufficiently decoupled
first looks at crosschannel correlations via a set of 1x1 convolutions.
then acts as a “multi-level feature extractor” by computing 1×1, 3×3, and 5×5 convolutions
output feature maps are stacked along the channel dimension
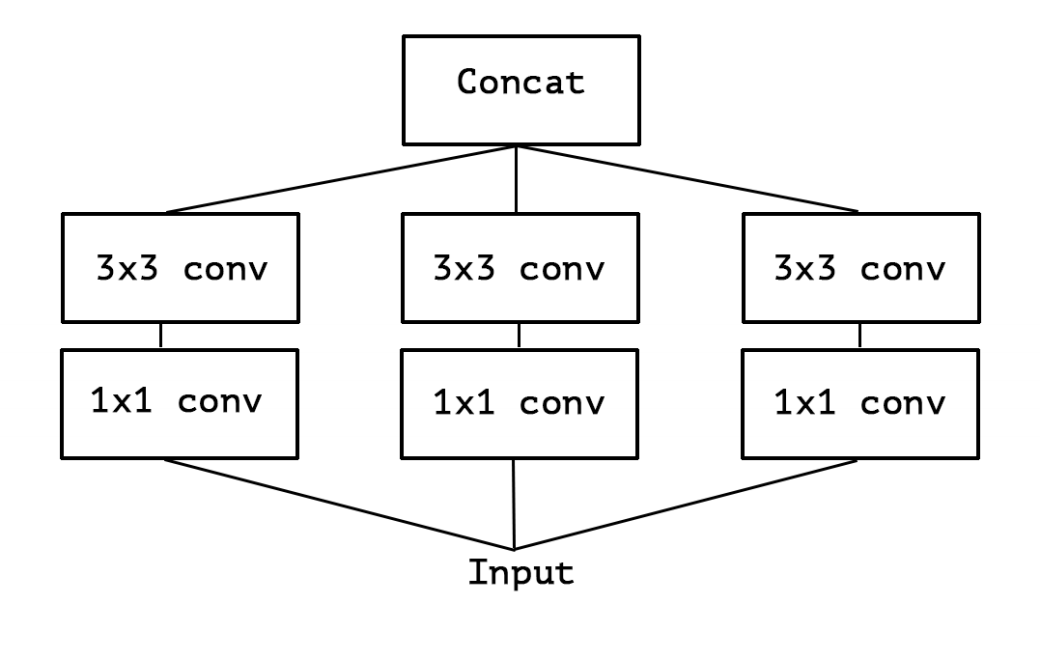
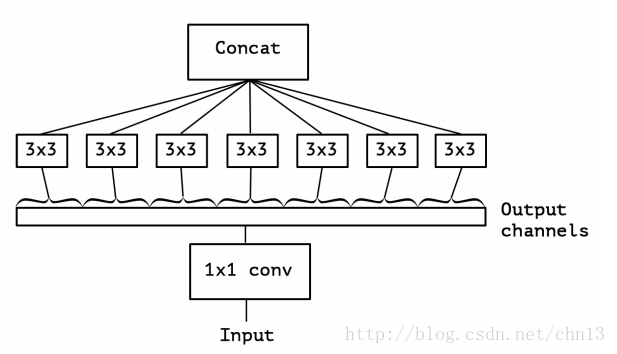
“extreme” version of Inception module:
first use a 1x1 convolution to map cross-channel correlations
then separately map the spatial correlations of every output channel (instead of just 3-4 partitions)
Similar to depthwise separable convolution
What makes depthwise separable convolution different
Two differences between and “extreme” version of an Inception module and a depthwise separable convolution
The order of the operations:
depthwise separable convolutions perform first channel-wise spatial convolution and then perform 1x1 depthwise convolution on the output.
Non-linearity after the first operation:
In Inception both operations are followed by a ReLU non-linearity
In depthwise separable convolutions don't have intermediate non-linearities
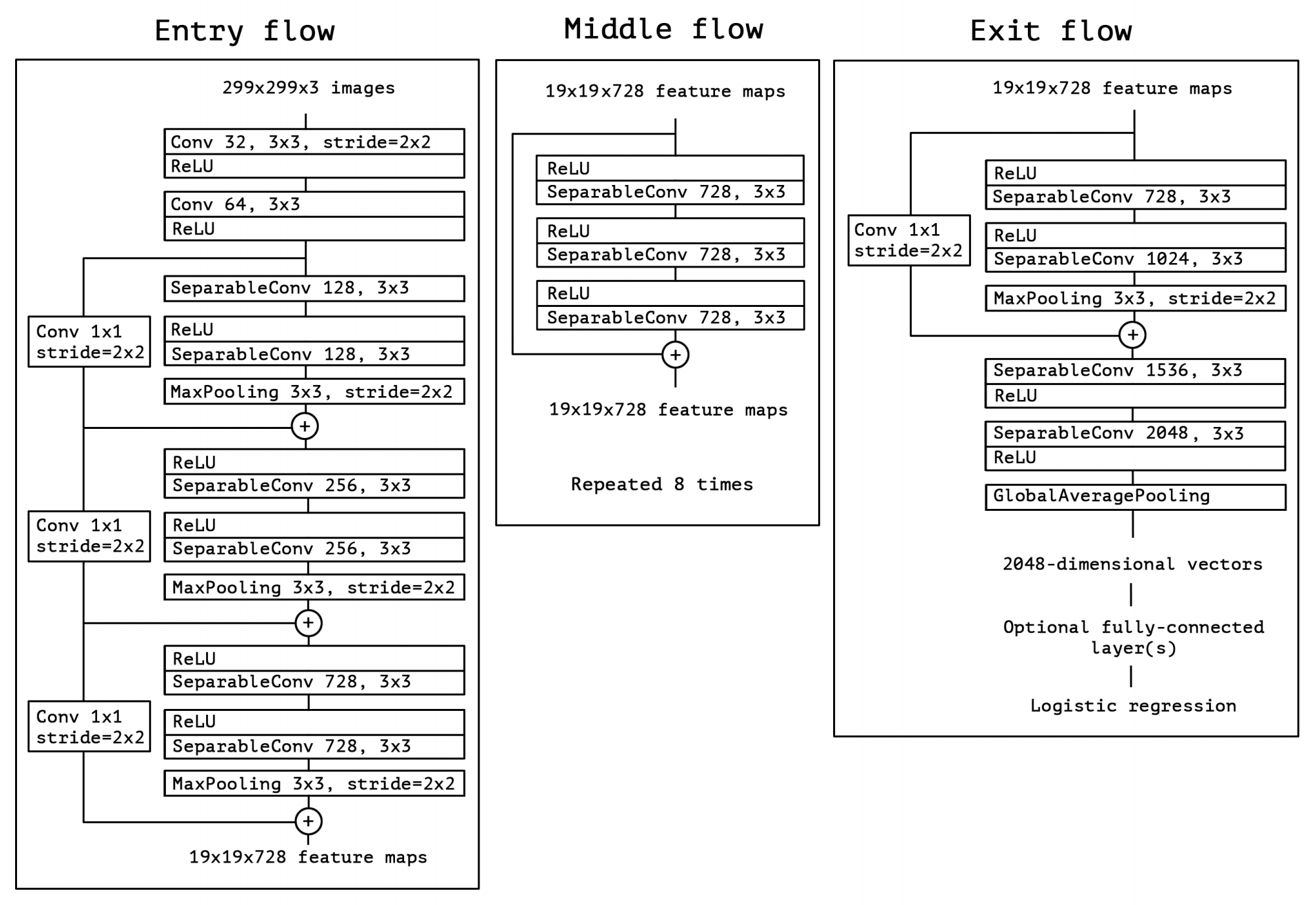
Xception architecture
convolutional neural network architecture based entirely on depthwise separable convolution layers.
fundamental hypothesis: mapping of cross-channels correlations and spatial correlations can be entirely decoupled.
composed of 36 convolutional layers forming the feature extraction base of the network
structured into 14 modules, all of which have linear residual connections around them, except for the first and last modules.
Next Lesson
Implementation of Xception model
depthwise separable convolution
Last updated